What is an LSTM (Long Short-Term Memory) network? How does it address vanishing gradients?
Answer
A Long Short-Term Memory network is a gated recurrent neural network designed to carry useful information across many sequence steps. Each cell maintains a cell state and uses forget, input, and output gates to control what is retained, written, and exposed. Its additive cell-state update creates a shorter gradient path than repeatedly multiplying through a vanilla RNN’s nonlinear state transition, so gradients can remain useful when forget gates stay near one. LSTMs mitigate vanishing gradients rather than eliminating them: saturated gates, long products of forget factors, and poor optimization can still weaken learning.

Figure 1: One LSTM timestep: gated reads and writes surround an additive cell-state highway, while the output gate produces the hidden state.
(1) Two Recurrent States: The cell state  is the long-term memory path, while the hidden state
is the long-term memory path, while the hidden state  is the exposed representation used by the next step and downstream layers.
is the exposed representation used by the next step and downstream layers.
(2) Gated Update: The forget gate scales old memory, the input gate controls a candidate update, and the output gate selects how much of the updated memory becomes visible.
(3) Gradient Preservation: The derivative along the direct cell-state path contains products of forget gates instead of repeated full recurrent Jacobians; values near one preserve gradient flow.
Mathematical Formulation:
![f_t=\sigma\!\left(W_f[x_t,h_{t-1}]+b_f\right)](https://s0.wp.com/latex.php?latex=f_t%3D%5Csigma%5C%21%5Cleft%28W_f%5Bx_t%2Ch_%7Bt-1%7D%5D%2Bb_f%5Cright%29&bg=ffffff&fg=000&s=3&c=20201002)
![i_t=\sigma\!\left(W_i[x_t,h_{t-1}]+b_i\right)](https://s0.wp.com/latex.php?latex=i_t%3D%5Csigma%5C%21%5Cleft%28W_i%5Bx_t%2Ch_%7Bt-1%7D%5D%2Bb_i%5Cright%29&bg=ffffff&fg=000&s=3&c=20201002)
![\tilde c_t=\tanh\!\left(W_c[x_t,h_{t-1}]+b_c\right)](https://s0.wp.com/latex.php?latex=%5Ctilde+c_t%3D%5Ctanh%5C%21%5Cleft%28W_c%5Bx_t%2Ch_%7Bt-1%7D%5D%2Bb_c%5Cright%29&bg=ffffff&fg=000&s=3&c=20201002)

![o_t=\sigma\!\left(W_o[x_t,h_{t-1}]+b_o\right)](https://s0.wp.com/latex.php?latex=o_t%3D%5Csigma%5C%21%5Cleft%28W_o%5Bx_t%2Ch_%7Bt-1%7D%5D%2Bb_o%5Cright%29&bg=ffffff&fg=000&s=3&c=20201002)

Where:
 is the timestep;
is the timestep;  is the current input, and
is the current input, and  are the previous hidden and cell states.
are the previous hidden and cell states. are element-wise forget, input, and output gates;
are element-wise forget, input, and output gates;  is the candidate cell update.
is the candidate cell update. is the updated long-term cell state and
is the updated long-term cell state and  is the exposed hidden state.
is the exposed hidden state. and
and  are learned affine parameters;
are learned affine parameters; ![[x_t,h_{t-1}]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSI1NyIgaGVpZ2h0PSIxNyIgdmlld0JveD0iMCAwIDU3IDE3Ij48cmVjdCB3aWR0aD0iMTAwJSIgaGVpZ2h0PSIxMDAlIiBzdHlsZT0iZmlsbDojY2ZkNGRiO2ZpbGwtb3BhY2l0eTogMC4xOyIvPjwvc3ZnPg==) denotes concatenation.
denotes concatenation. is sigmoid,
is sigmoid,  is hyperbolic tangent, and
is hyperbolic tangent, and  is element-wise multiplication; the direct derivative includes
is element-wise multiplication; the direct derivative includes  .
.
 is the timestep;
is the timestep;  is the current input, and
is the current input, and  are the previous hidden and cell states.
are the previous hidden and cell states. are element-wise forget, input, and output gates;
are element-wise forget, input, and output gates;  is the candidate cell update.
is the candidate cell update. and
and  are learned affine parameters;
are learned affine parameters; ![[x_t,h_{t-1}]](https://s0.wp.com/latex.php?latex=%5Bx_t%2Ch_%7Bt-1%7D%5D&bg=ffffff&fg=000&s=2&c=20201002) denotes concatenation.
denotes concatenation. is sigmoid,
is sigmoid,  is hyperbolic tangent, and
is hyperbolic tangent, and  is element-wise multiplication; the direct derivative includes
is element-wise multiplication; the direct derivative includes  .
.
Figure 2: Why LSTMs mitigate vanishing gradients: a vanilla RNN repeatedly multiplies full nonlinear Jacobians, whereas the LSTM provides a gated direct memory path.


 = number of input units
= number of input units = number of output units
= number of output units means weights are sampled from a normal (Gaussian) distribution with mean
means weights are sampled from a normal (Gaussian) distribution with mean  and variance
and variance  .
. means weights are sampled from a uniform distribution in the range
means weights are sampled from a uniform distribution in the range ![[a, b]](https://s0.wp.com/latex.php?latex=+%5Ba%2C+b%5D+&bg=ffffff&fg=000&s=2&c=20201002) .
.



 is the 1st moment (mean of gradients).
is the 1st moment (mean of gradients). is the gradient at step
is the gradient at step  controls momentum (default: 0.9).
controls momentum (default: 0.9).
 is the 2nd moment (variance of gradients).
is the 2nd moment (variance of gradients). controls smoothing of squared gradients (default: 0.999).
controls smoothing of squared gradients (default: 0.999).

 is the bias-corrected 1st moment.
is the bias-corrected 1st moment. is the bias-corrected 2nd moment.
is the bias-corrected 2nd moment. ,
,  are the exponential decay raised to step
are the exponential decay raised to step  ) and divides by the square root of the bias-corrected second moment (
) and divides by the square root of the bias-corrected second moment (
 are model parameters.
are model parameters. prevents division by zero.
prevents division by zero.
 and an optional balancing weight
and an optional balancing weight  to suppress gradients from easy, majority-class examples and amplify learning from hard or minority-class examples, improving performance in severe class-imbalance settings when hyperparameters are properly tuned.
to suppress gradients from easy, majority-class examples and amplify learning from hard or minority-class examples, improving performance in severe class-imbalance settings when hyperparameters are properly tuned.
 is the model probability for the ground-truth class;
is the model probability for the ground-truth class; is the focusing parameter that down-weights easy examples;
is the focusing parameter that down-weights easy examples; is an optional class-balancing weight for class t.
is an optional class-balancing weight for class t.
 values and an example
values and an example 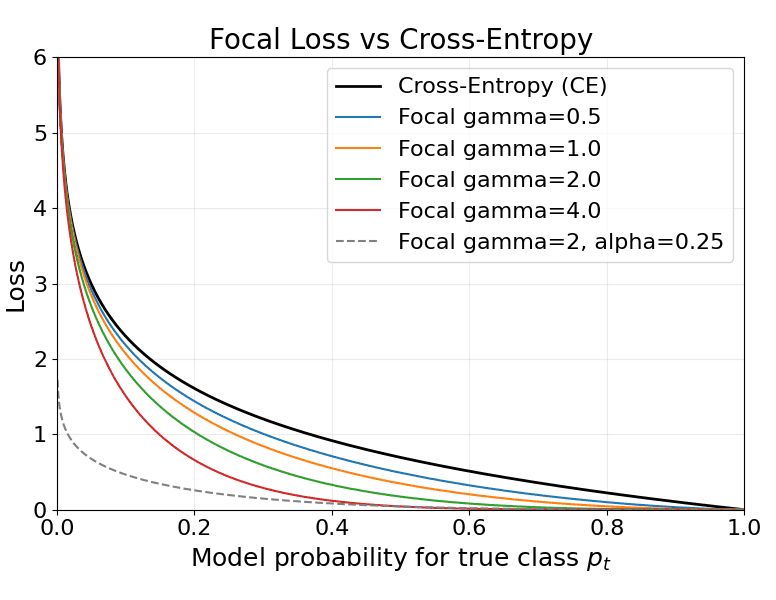

 = query of the current token t.
= query of the current token t. = cached keys and values for all tokens up to t.
= cached keys and values for all tokens up to t. = key dimension.
= key dimension.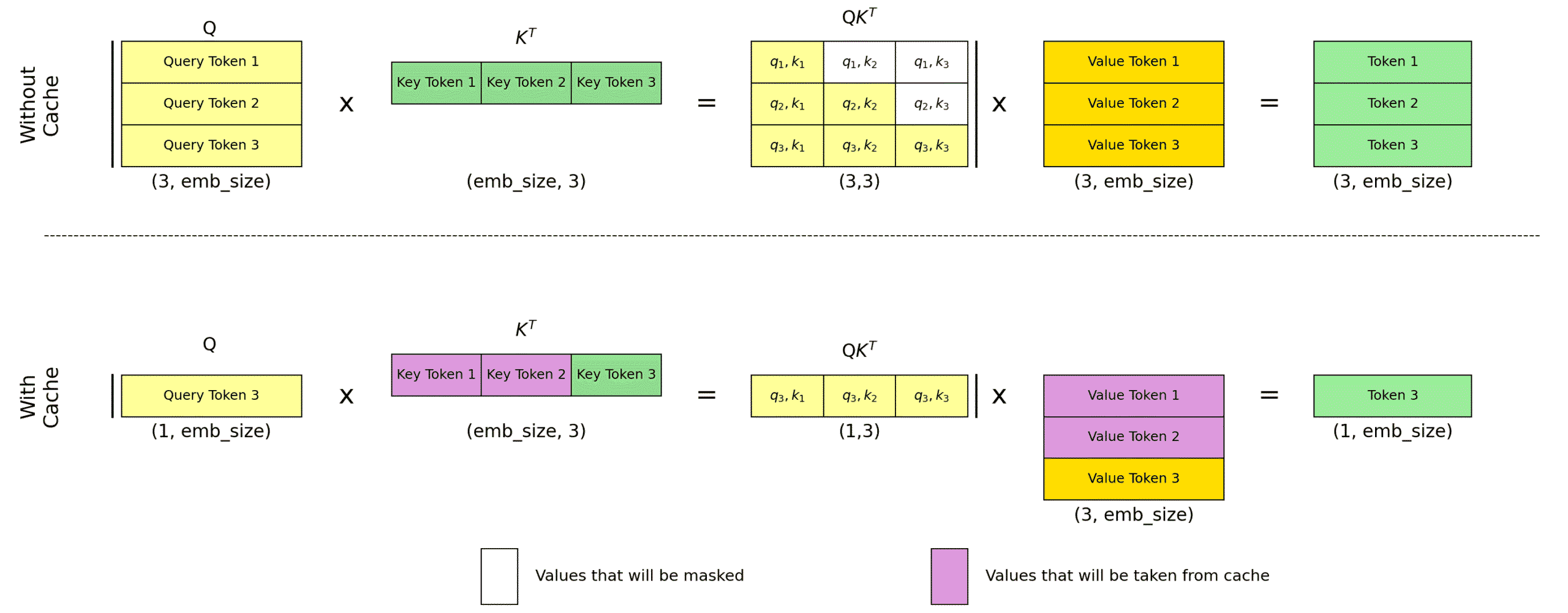

 query matrix.
query matrix. key matrix.
key matrix. value matrix.
value matrix. mask matrix with 0 for allowed positions and large negative values (e.g., −∞) for disallowed positions.
mask matrix with 0 for allowed positions and large negative values (e.g., −∞) for disallowed positions.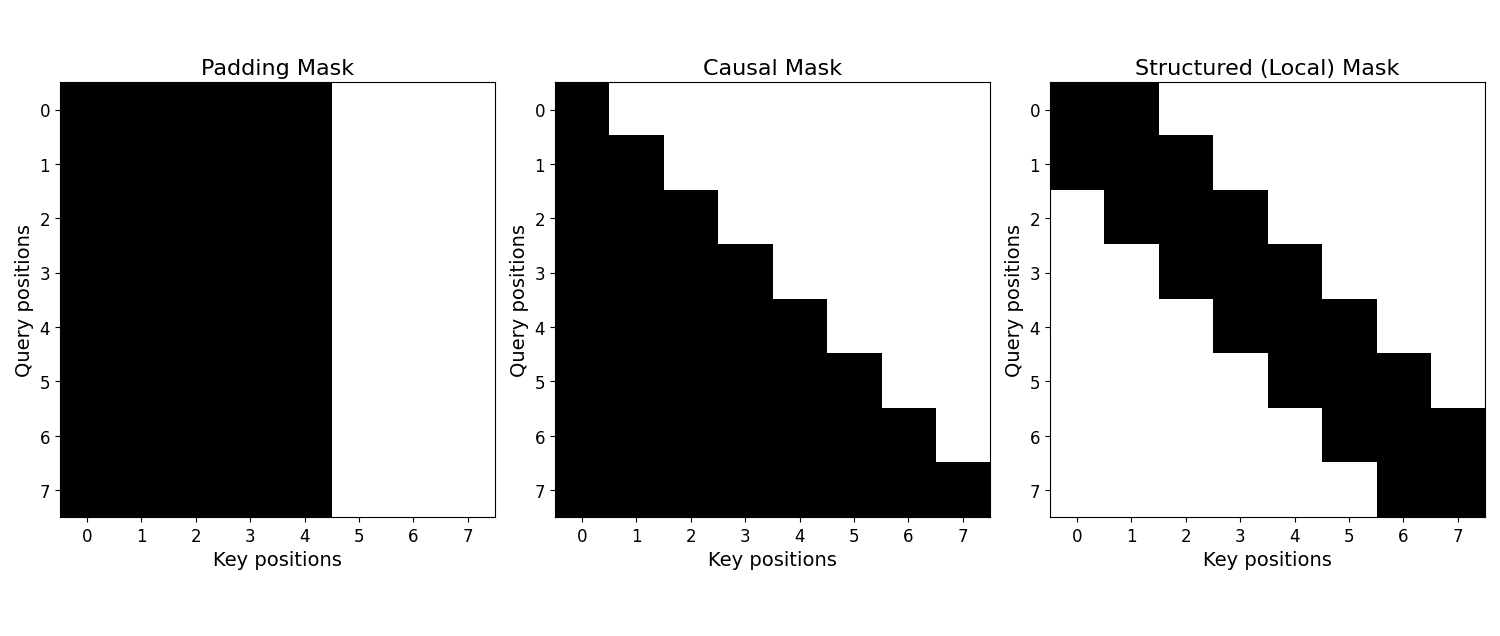
![\mbox{GELU}(x) = x \cdot \Phi(x) = x \cdot \frac{1}{2}\left[1 + \mbox{erf}\left(\frac{x}{\sqrt{2}}\right)\right]](https://s0.wp.com/latex.php?latex=%5Cmbox%7BGELU%7D%28x%29+%3D+x+%5Ccdot+%5CPhi%28x%29+%3D+x+%5Ccdot+%5Cfrac%7B1%7D%7B2%7D%5Cleft%5B1+%2B+%5Cmbox%7Berf%7D%5Cleft%28%5Cfrac%7Bx%7D%7B%5Csqrt%7B2%7D%7D%5Cright%29%5Cright%5D&bg=ffffff&fg=000&s=3&c=20201002)
 is the input,
is the input,  is the Cumulative Distribution Function (CDF) of the standard Gaussian.
is the Cumulative Distribution Function (CDF) of the standard Gaussian.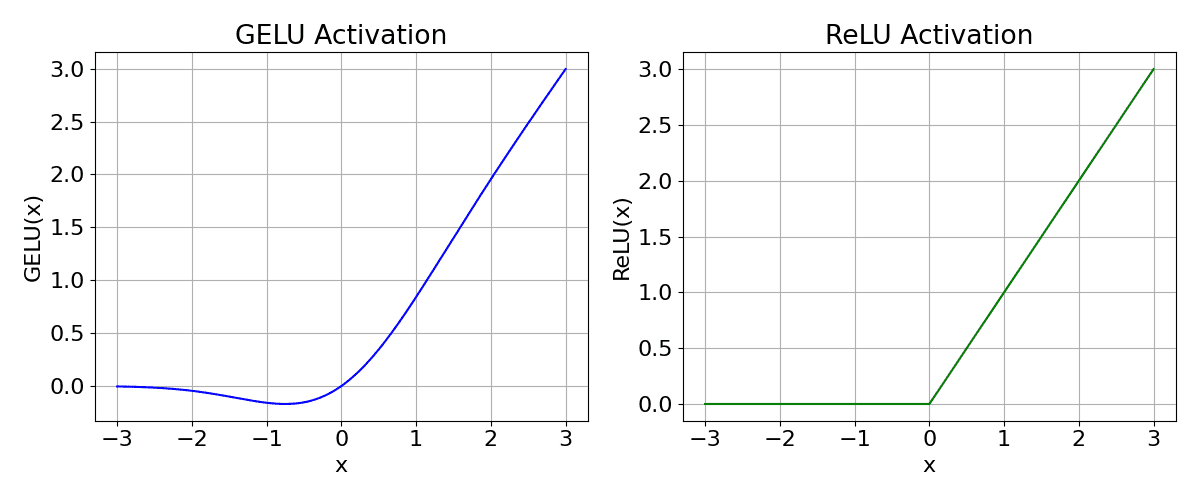

 represents the raw attention score for the i-th token,
represents the raw attention score for the i-th token, 

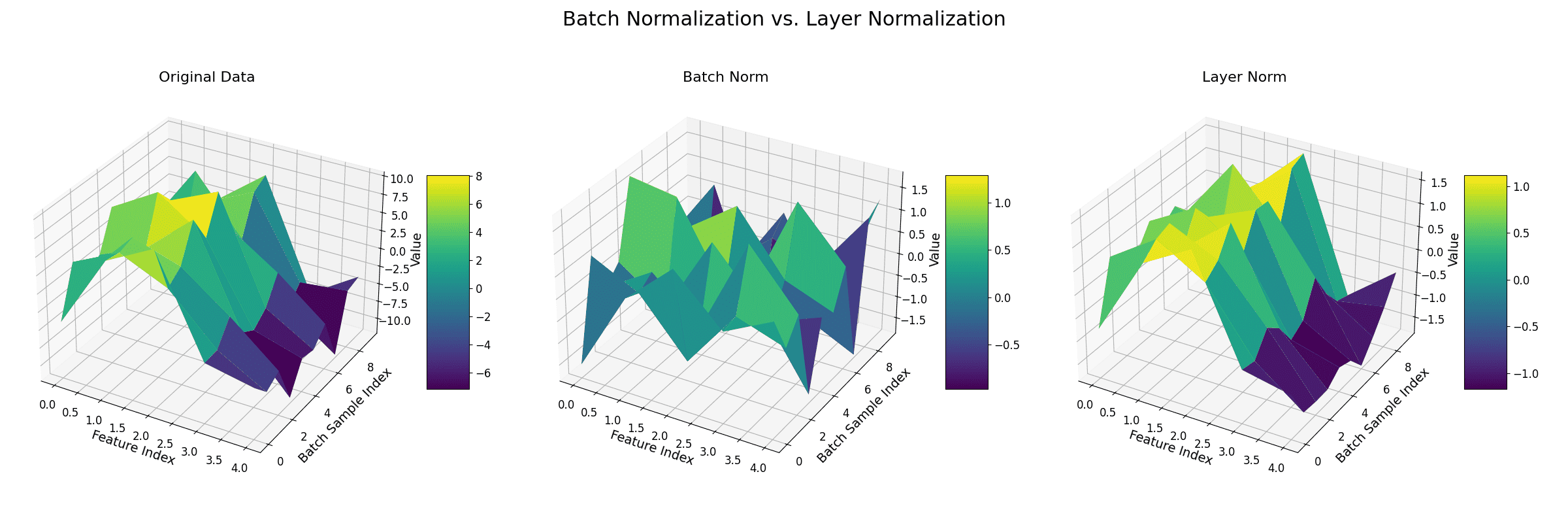
 = input feature,
= input feature, = standard deviation of all features,
= standard deviation of all features, = small constant for numerical stability,
= small constant for numerical stability, = learnable scale and shift parameters.
= learnable scale and shift parameters.